Demo¶
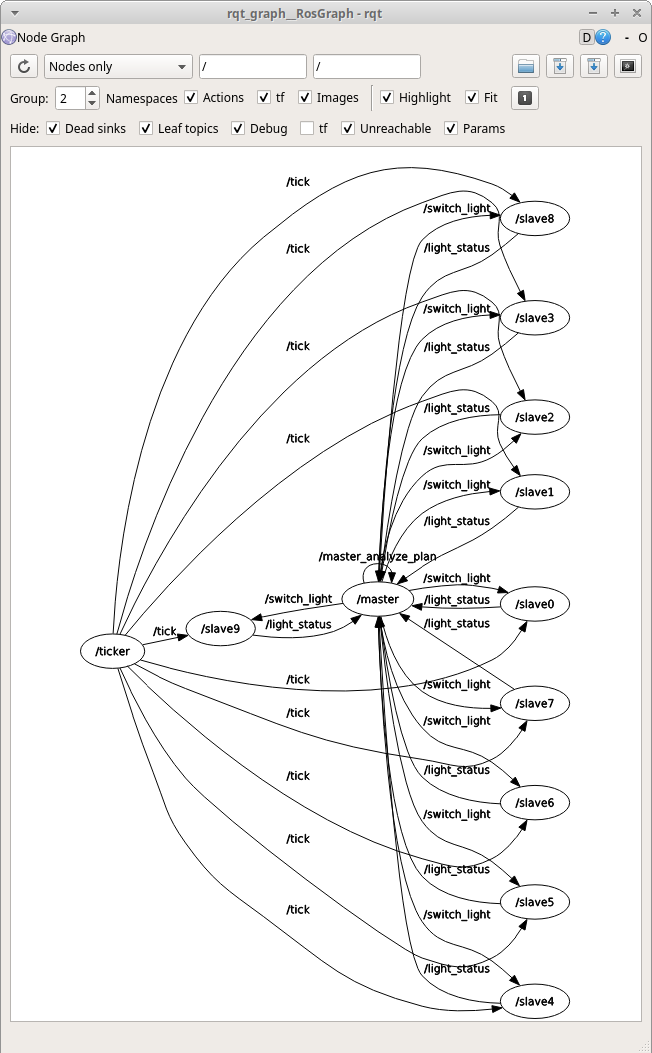
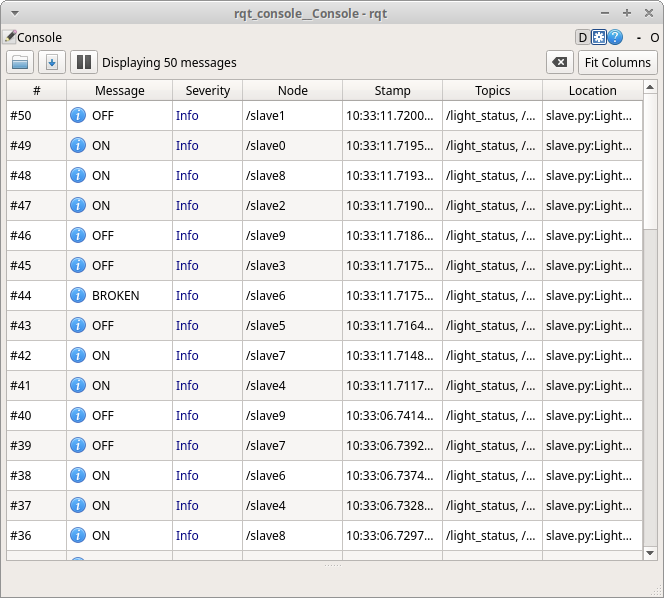
The demo aims to emulate a sequence of light poles along a path. To save energy, the light poles are turned on in an alternate fashion (in this specific case one on and one off, but it is possible to change criterion). If, for some reasons, a light bulbs went out the system will be able to self-heal himself by adjusting the list of lights on to reduce at least the discomfort due to the breakage of the bulb.
Run the demo¶
- Activate your workspace.
cd /path/to/your/catkin_workspace
source devel/setup.bash
- Launch the demo using roslaunch.
roslaunch mapek_framework_demo demo.launch
- (Optional) Inspect nodes using rqt_graph and rosrun rqt_console rqt_console.